About
Time: Sep 2020 - Jan 2021
Work: In a 4-people group
Role: Project manager. Scheduled the timeline and gantt chart and distribute the workload. Also responsible for the frame's structure calculating and assembling electronic components.
Budget: 300 US dollars
Skills Gained: Lead the team and plan the schedule, Solidwork, Structure analysis
Target
During the pandemic, people are not allow to go out and meet each others. We aimed to design a quadcopter that can carry up to 1.5 kilogram goods to people. We must complete this task wihtin certain constraints.
Constraints
1. Budget: 300 USD
2. Time: 8 weeks
3. Loads: up to 1.5 kilograms
4. Flight duration: At least 10 minutes
Schedule I managed (Gantt Chart)
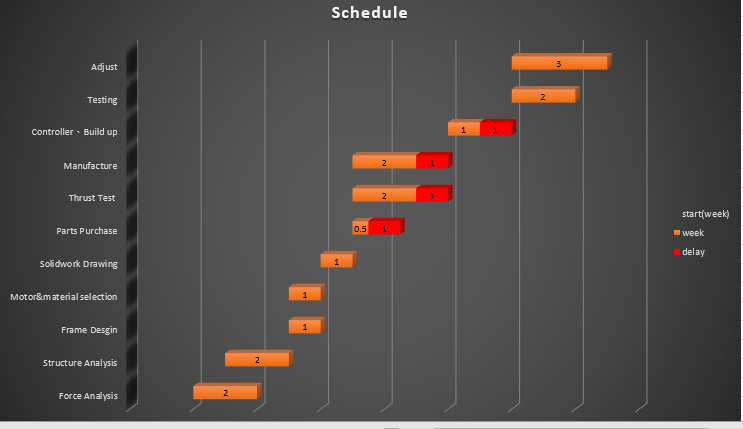
Two incidents resulted in two delays.
The first delay is that the school manufacturing place are not able to help us to cut the carbon fiber plate. Hence, we redesigned the structure of body again using wood as fast as we could
The second delay is the shipping delay due to typhoon.
Sturcture Design & Analysis
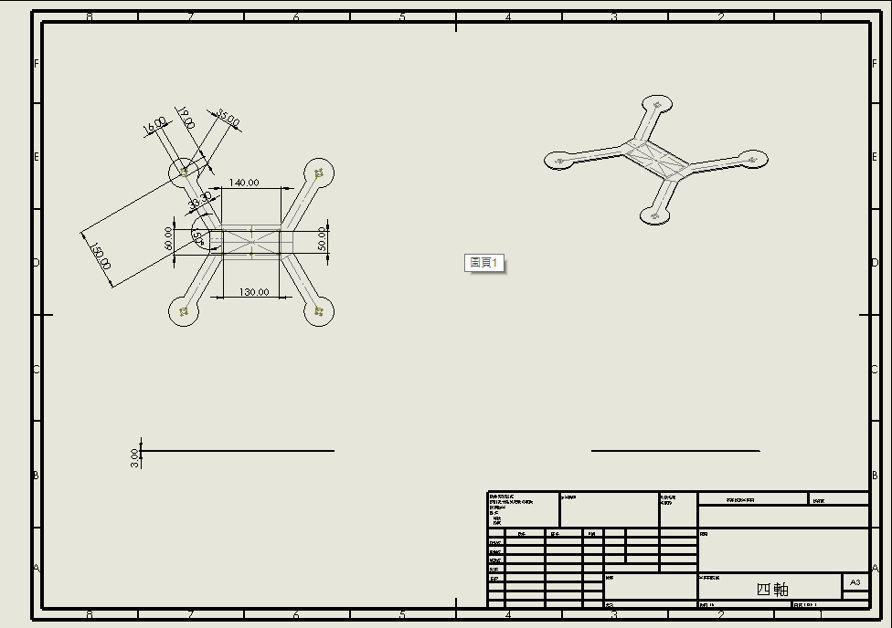
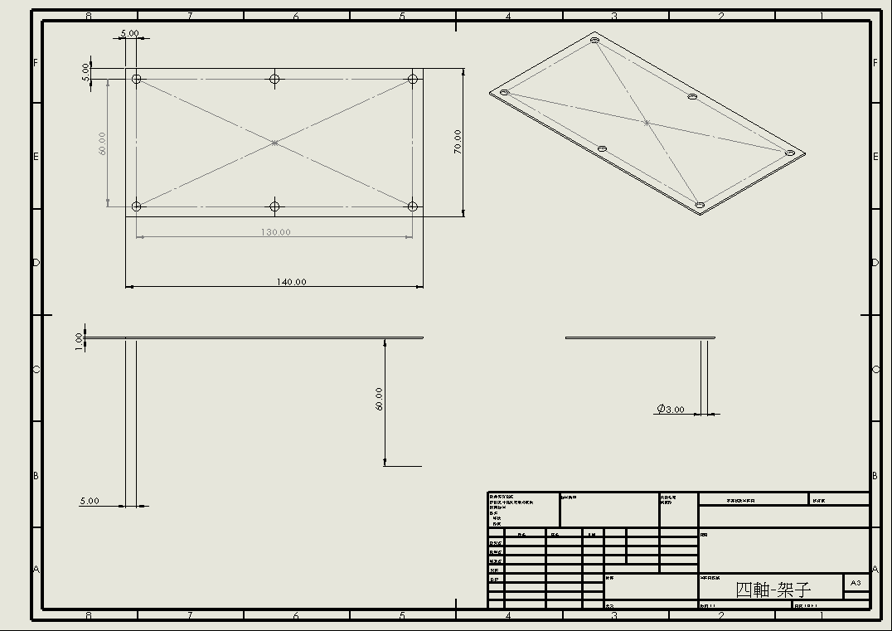
We decided to desgin a hybird-H frame quadcopter, and we first plan use carbon fiber since it has the strongest stress bearing and less bending within same mass compared to other materials. However, as I mentioned before, the school didn't allow us to cut the carbon fiber so we used wood instead. These are the draft and the solidwork of our design.
We used solidwork to estimate the weight of the quadcopter frame and use the result to esitmate the safe thickness and the bending of frame. After applying safety factor 1.5, we decided to use 5 mm thick body frame so that the bending will be only 0.00067 mm.
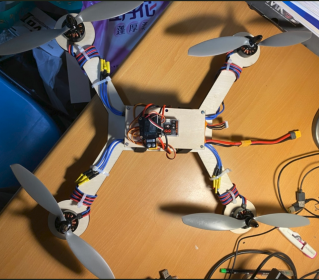
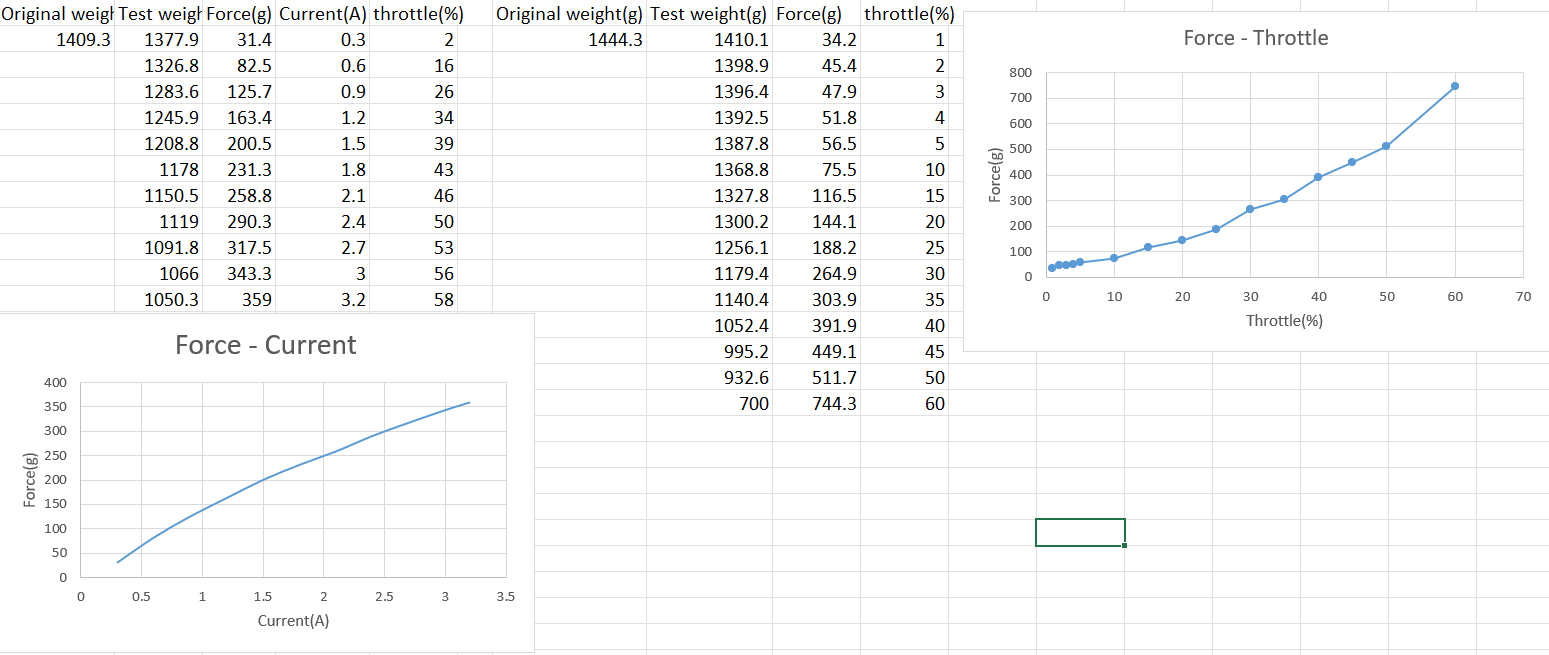
Motor throttle testing
We built our own motor throttle test stand so that we won't go over the budget. Even the website has provide some data under certain throttle, it is important to test by our own again to make sure everything works what we want.
Motor stand we built

Bonus
After this course, I found my strong interst in vehicles and quadcopter. Since I got experience from previous project, I am able to make process faster and more accurate and are able to make a high-quality quadcopter. I am planning to make it flying fully autonomously and is now trying.